I’ve been itching to get into the Servo motors for a while now. One thing that I’m hoping to accomplish with this class is to create a moveable still camera rig whose position can be easily programmed in for use in stop-motion. So, for this assignment, I figured I’d dip my toe into that particular pool by doing Lab 4.
I started with by setting up all of the sensors the way that they said to, using a force-sensitive resistor that I had borrowed from the lab.

The next step, of course, is to calibrate the thing. I left the resistor untouched and took a look at what the computer read.

Goose eggs. Good. Now let’s see what happens when I push down hard with my thumb and forefinger.


Maximum is in the 860 range. So let’s map our inputs to that range and write to the Servo.
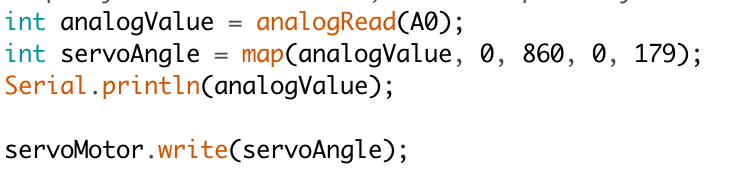
Ok, that should do it. Does it work?
I shot vertical video. Sue me.
I count that as a success.